[과학주치의] ‘두 발로 걷기’와 ‘버드봇(BirdBot)’
‘두 발로 걷기’와 ‘버드봇(BirdBot)’
Manners, Maketh, Man.” 매너가 사람을 만든다.

영화 ‘킹스맨: 시크릿 에이전트’ 개봉 당시, 센세이셔널(sensational)했던 극중 대사다. 사실 저 대사 장면 이전에, 해리의 오랜 동료였던 랜슬롯이 작전 중 악당 가젤(배우: Sofia Boutella, 소피아 부텔라)에게 몸이 좌우로 반토막이 나 목숨을 잃게 되고, 이에 해리(배우: Colin Firth, 콜린 퍼스)는 깊은 상념에 빠지게 된다. 그런데 이런 상황을 모르는 딘의 부하 들은 눈치 없이 주인공 해리에게 술집에서 시비를 걸다가 인생의 참교육(?)을 당한다.
▲ [그림 1] 영화 킹스맨, 가젤役(배우: Sofia Boutella, 소피아 부텔라)
한편, 이 가운데 필자의 이목을 끈 이가 있으니 바로 악당 ‘가젤’이다. 가젤은 영화에서 리치몬드 발렌타인(배우: Samuel Leroy Jackson, 새뮤얼 엘. 잭슨)의 비서 겸 경호원이다. 극중 캐릭터의 자세한 사정은 모르겠으나, 두 다리가 없는 대신 막강한 절삭력의 칼날이 튀어 나오고 스프링이 달린 무시무시한 의족을 달고 있는 인물이다. 영화를 보신 분이라면 아시겠지만, 가젤의 액션은 킹스맨의 백미로 꼽힌다. 주인공 이름에서, 몸이 모두 섬세하고 우아하며, 몸통이 좁고 다리가 긴, 우리가 아는 가젤(gazelle)이라는 동물이 떠오르는데, 아마도 이러한 모습에서 이름을 따온 듯하다.
그런데 문득 영화의 흥미와는 별개로, ‘현실에서 주인공 가젤을 재현할 수 있을까?’, ‘어떻게 저런 균형 감각을 유지하며 빠르게 움직일 수 있나?’, ‘만약 기계나 로봇으로 사람의 다리를 대체한다면, 어디까지 대체할 수 있을까?’라는 호기심이 발동했다. 마침 이 기회에 당시의 궁금증을 해소해 보기로 했다.
‘두 발로 걷기’의 의미와 이론
직립보행은 학창 시절 수업 시간에 자주 들어서 그런지 몰라도 우리에게 익숙한 단어다. 그런데 자세히 들여다보면, 인류의 직립보행을 설명하는 이론은 많지만 명확하게 설명하 는 이론은 많지 않다. 그도 그럴 것이, 억겁의 시간을 거슬러 올라가 이를 입증한다는 것 자체가 과학적으로 부담스러울 뿐만 아니라 진화라는 다소 민감한 주제가 함께 맞물려 있기도 한 까닭이다.
다만 이해를 돕기 위해 몇 가지 이론을 소개하면 이렇다. 찰스 다윈은 인류가 손을 자유롭게 만들어 돌과 같은 도구를 사용하고 창과 같은 무기를 만들기 위해 두 발로 걷게 됐다고 설명했다.1) 하지만 인류가 사용한 최초의 도구는 250만 년 전의 것으로 인류가 직립 보행을 시작한 지 400만 년 후에 나타났기 때문에, 이 이론은 현재 적절하지 않다.
인류학자 오웬 러브조이가 2010년 다윈의 이론을 되살려 직립보행의 원인은 일부일처제 때문이라는 이론을 내놓았다. 초기 호미니드(현생 인류가 되기까지 있었던 사람과 관련된 모든 영장류를 지칭하는 말)는 대부분 숲에서 서식하고 있었는데 기후가 변화함에 따라 계절 변화로 식량을 구하기 더욱 힘들어졌고, 이때 수컷은 가족 모두에게 먹일 식량을 더 많이 들고 다녀야 했기 때문에 손과 팔로 먹을 것을 들고 다니도록 진화하면서 직립보행을 하게 됐다는 설명이다.
또 다른 이론으로는 이동에 더욱더 효율적이기 때문에 직립보행이 나타났다는 설명이 있다. 기후 변화가 일어나던 시기, 호미니드는 자연 서식지가 줄어들자 숲의 보금자리에서 내려와 광활한 초원에서 다른 숲 서식지를 찾아다녀야 했는데 에너지 소비를 막으려면 두 발로 걷는 것이 더욱 효과적이었다는 설명이다. 실제, 미국 유타대학의 커닝험 교수 연구팀이 발표한 논문에 따르면, 인간처럼 발바닥을 땅에 붙이고 걷는 보행 방식은 에너지 절약 측면에서 매우 큰 강점을 보인다고 한다.2)
한편, 2012년 네이처에 발표된 논문에 따르면, 340만 년 전에 존재했던 원시 인류의 발 모양이 땅에서 두 다리로 걸으며 생활하기보다 다른 영장류들처럼 나무 위에서 생활하기에 적합했다고 한다.3) 이는 다소 충격적인 연구 결과다. 즉, 직립보행과 손을 자유롭게 사용하는 것은 순차적으로 일어난 것이 아니라는 이야기다. 이는 이전까지 받아들여져 온 인류 기원의 진화 과정을 완전히 뒤집는 이론이다. 여기까지 여러 이론을 살펴보았지만, 어느 이론도 인간의 직립보행에 대해 명쾌하게 설명하지 못하고 있는 듯하다.
‘두 발로 걷기’의 위대함
레오나르도 다빈치(1452~1519)는 “인간의 발은 공학 기술 최고의 걸작품이요, 예술작품이다”라고 했다.4) 발은 몸의 표면적 가운데 불과 2%에 그치지만 뼈와 근육의 4분의 1이 발에 있다. 발은 양쪽 각각 26개의 뼈로 구성되어 인간의 뼈 206개 중에서 25%를 차지한다.
또 관절은 33개로 척추(24개)보다 많다. 아주 정교한 기계인 셈이다. 발바닥과 발가락 사이에서 일어나는 아주 작은 움직임은 골반의 3차원적인 움직임을 만들어 낸다.
발의 구조는 앞발과 중간발, 그리고 뒷발로 이루어져 있다. 이러한 아치(Arch) 구조는 체중을 골고루 받쳐 주고, 걸을 때, 점프하거나 높은 곳에서 뛰어내릴 때 충격을 흡수해 준다. 이러한 아치 구조와 관련하여, 최근에는 세로 아치뿐만 아니라 가로 아치도 중요한 역할을 한다는 사실이 밝혀졌다.5) 또한 발뒤꿈치는 발에서 가장 큰 뼈로, 몸을 지탱해 주는 중심 역할을 한다.
발가락들은 체중을 한쪽에서 다른 쪽으로 옮겨 주는 지렛대 역할과 앞으로 밀고 나가는 추진력 역할을 하며, 발등은 이 모든 동작을 매끈하고 유연하게 해주는 역할을 한다. 발 뒤꿈치와 전방으로 곧게 뻗은 엄지발가락, 그리고 아치형의 구조가 인간의 완벽한 직립 보행을 가능하게 만든다(영장류가 비슷한 걸음걸이를 보이기는 하나, 뒤뚱거리거나 일시적으로 서 있는 수준이다).
이처럼 우리가 걸어가는 그 단순한 행동 하나에도 복잡한 인체 공학이 숨겨져 있다. ‘두 발로 걷기’는 그리 간단한 메커니즘이 아니며, 보행의 측면에서 다른 생물에 비해 우위에 놓여 있다고 볼 수 있는 인간의 주된 특징임은 분명하다.
‘타조’와 ‘두 발 로봇’의 미래
로봇 산업에서도 ‘두 발로 걷기’는 아직 정복하지 못한 영역이다. 무슨 이야기인가 하니, 우리의 일상 환경은 인간 중심으로 설계돼 있어, 미래의 로봇 산업은 인간형 로봇을 만드는 것에 초점이 맞춰져 있다. 그러나 앞에서 살펴보았듯이 ‘두 발로 걷기’는 인간을 제외한 자연계에서 재현해 내기 쉽지 않음을 확인할 수 있다. 이는 로봇 산업에도 마찬가지다.
특히 인간의 보행을 모델로 한 2족 보행 로봇은 몸의 균형을 유지하며 다리를 움직이는 데 많은 에너지가 들어가기 때문에, 어찌 보면 공학적으로 비효율적인 로봇이 될 수밖에 없다. 그렇다면, 인간형(形) 로봇 대신 두 발로 걷는 새 형(形) 로봇은 어떨까? 독일 막스 플랑크 지능형 시스템 연구소와 미국 어바인 캘리포니아대(UCI) 연구진이 타조를 모델로 삼아 에너지 효율이 훨씬 좋은 2족 보행 로봇 ‘버드봇(BirdBot)’을 개발해 국제학술지 ‘사이언스 로보틱스’에 발표했다.6)
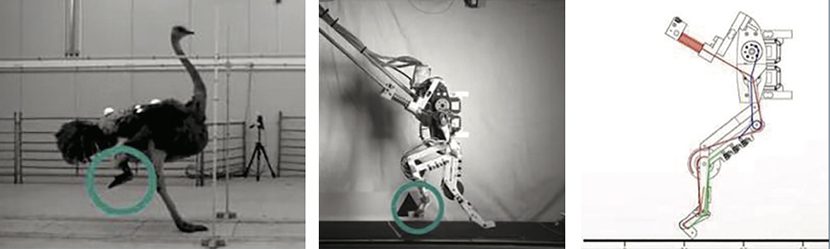
▲ [그림 2] 타조처럼 달리는 버드봇. Image Credit : Alexander Badri-Sprowitz, MPI-IS
타조는 몸무게가 100kg을 넘는 큰 덩치에도 불구하고 초원에서 최대 시속 55km의 속도로 달릴 수 있다. 연구진은 타조의 뛰어난 운동 능력의 비밀이 특별한 다리 구조에 있을 것으로 보고 분석에 들어갔다. 새는 이동을 위해 다리를 들어 올릴 때 발을 뒤로 젖힌다. 날지 못하는 새 타조도 마찬가지다. 반면 인간의 발과 발가락은 땅바닥에 있을 때나 들어 올릴 때나 항상 앞을 향하고 있다. 연구진은 여기에 사뿐사뿐하게 걷는 새의 이동 비결이 숨어 있을 것으로 생각했다.
연구진은 5년간을 매달린 끝에, 새의 독특한 다리 접기의 핵심은 우리가 흔히 아는 신경 전달에 따른 전기 자극-근육 움직임 시스템이 아니라, 다리에서 발에 이르는 여러 관절이 하나로 구동되어 작동하는 기계적 시스템임을 알게 되었다. 연구진은 발에 모터를 다는 대신 스프링과 연결선으로 이뤄진 관절을 만들고, 도르래를 이용해 관절과 관절 사이를 기계적으로 연결했다. 이러한 버드봇은 스프링이 힘줄 역할을 하면서 자연스레 관절에 힘이 들어가기 때문에, 다리를 땅에 디딘 상태에서는 발과 다리 관절에 힘을 전해줄 동력 장치가 필요 없다(그림 3).
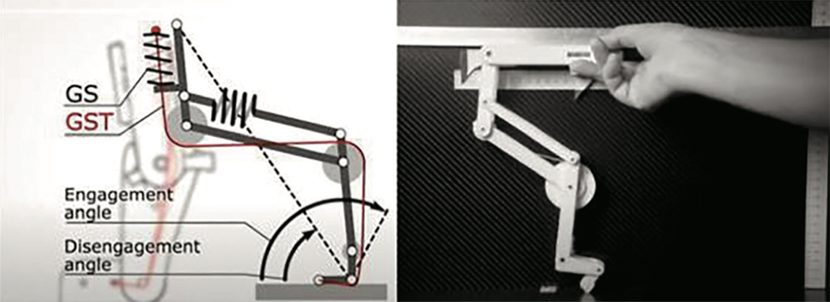
▲ [그림 3] 타조의 관절 역할을 하는 ‘버드봇’의 스프링
버드봇 다리를 러닝머신에서 걸어보게 하고 이를 관찰했더니, 앞뒤로 움직이는 동작에 서는 발과 다리를 잇는 스프링(힘줄)이 풀리면서 타조처럼 발이 뒤로 접혔다. 엉덩이에서 무릎과 발까지 이어지는 다리가 전체적으로 하나의 긴 스프링처럼 작동해 에너지 소비량을 줄여줬다. 연구진은 “이렇게 튼튼하고 빠르고 효율적인 구조 덕분에 타조처럼 덩치가 크고 무거운 새도 빠르게 달릴 수 있다”라고 설명했다. 연구진에 따르면 버드봇과 같은 구조의 다리를 1m 이상 길게 만들면 이론상 무게가 몇 톤이나 되는 로봇도 큰 힘이 들어가지 않고 움직이게 할 수 있다고 한다. 과연 미래에는 타조 다리를 한 버드봇이 우리 삶의 일부를 차지하고 있을지 문득 궁금해진다. 어쩌면 킹스맨의 속편에는 가젤이 아닌 오스트리치(ostrich, 타조) 역할이 등장할지도 모르겠다.
1) 손승빈, “인간이 두 발로 걷게 된 이유는? 직립보행에 관한 흥미로운 이론”, 리서치페이퍼, 2019. 10. 16. http://www.research-paper.co.kr/ news/articleView.html?idxno=240676 이하 참조.
2) Cunningham CB, Schilling N, Anders C, Carrier DR. “The influence of foot posture on the cost of transport in humans”, J Exp Biol. 2010 Mar 1;213(5):790-7. doi: 10.1242/jeb.038984. PMID: 20154195.
3) 곽민준, “‘직립보행’과 ‘손’의 진화”, 2018. 09. 21. https://www.ibric.org/myboard/read.php?Board=news&id=297948 이하 참조. Yohannes H.S. et al. "A new hominin foot from Ethiopia shows multiple Pliocene bipedal adaptations", Nature(2012). 에서 재인용
4) 이길우, “당신의 발이 최고의 걸작품인 이유를 아시나요?. 2018. 10. 25. http://plug.hani.co.kr/health/3381416 이하 참조.
5) 김병희, “인간의 발에 대한 통념이 뒤집혔다”, The Science Times, 2020. 02. 28. https://www.sciencetimes.co.kr/ news/%EC%9D%B8%EA%B0%84%EC%9D%98-%EB%B0%9C%EC%97%90-%EB%8C%80%ED%95%9C- %ED%86%B5%EB%85%90%EC%9D%B4-%EB%92%A4%EC%A7%91%ED%98%94%EB%8B%A4/ 이하 참조.
6) 곽노필, “‘타조’에게서 ‘두 발 로봇의 미래’ 찾았다.”, 2022.04.13. https://www.hani.co.kr/arti/science/technology/1038687.html 이하 참조.